CHIRONモータードライバ交換
2020-06-27
Suns & Moon Laboratory
ANYCUBIC CHIRONメモ
勢いでCHIRONのモータードライバ交換しました。
ザックリ手順
モータードライバ交換
▼
ファーム(Marlin)書き換え
モータードライバ交換
差し替えるモータードライバいろいろあるのですが、今回はTMC2209を選択しました。
Bigtreetech TMC2209
交換するならTMC2208を強くお勧めします。
なぜならファーム等がTMC2208前提で書かれているからです。
というのはつゆ知らず適当にTMC2209を選びました。ちょっと違うだけなんで今回は事なきを得ました(o゜▽゜)
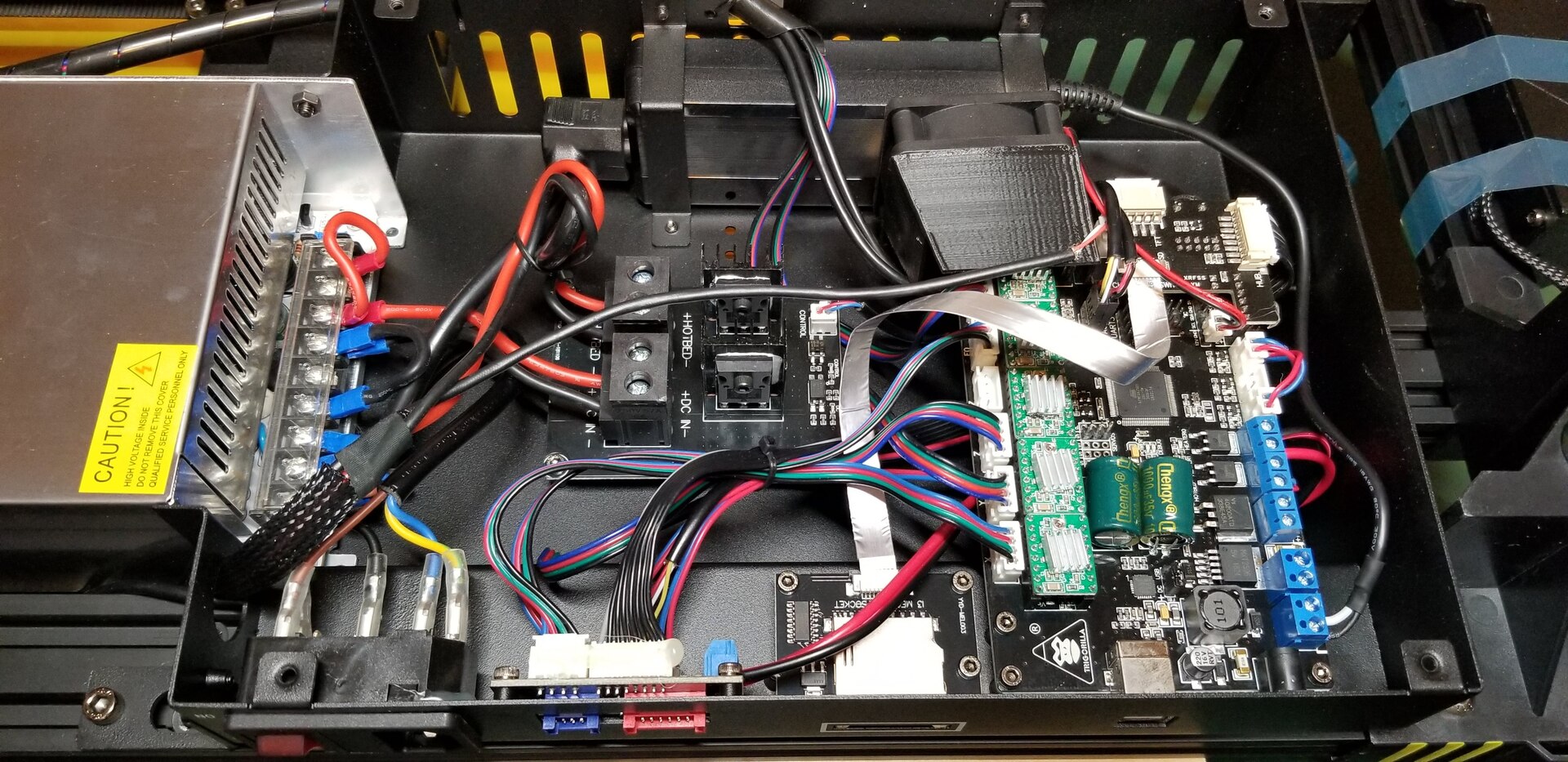
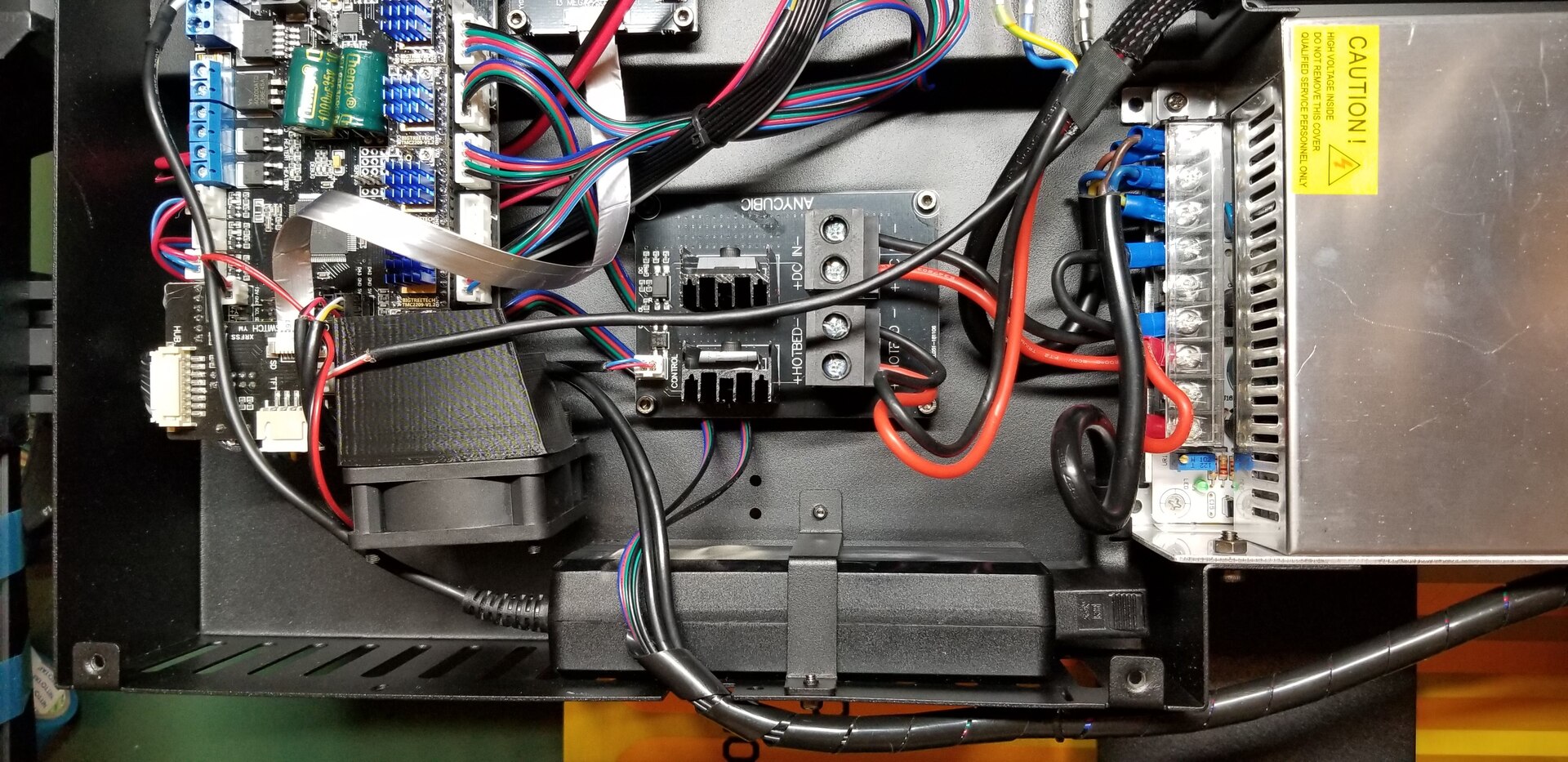
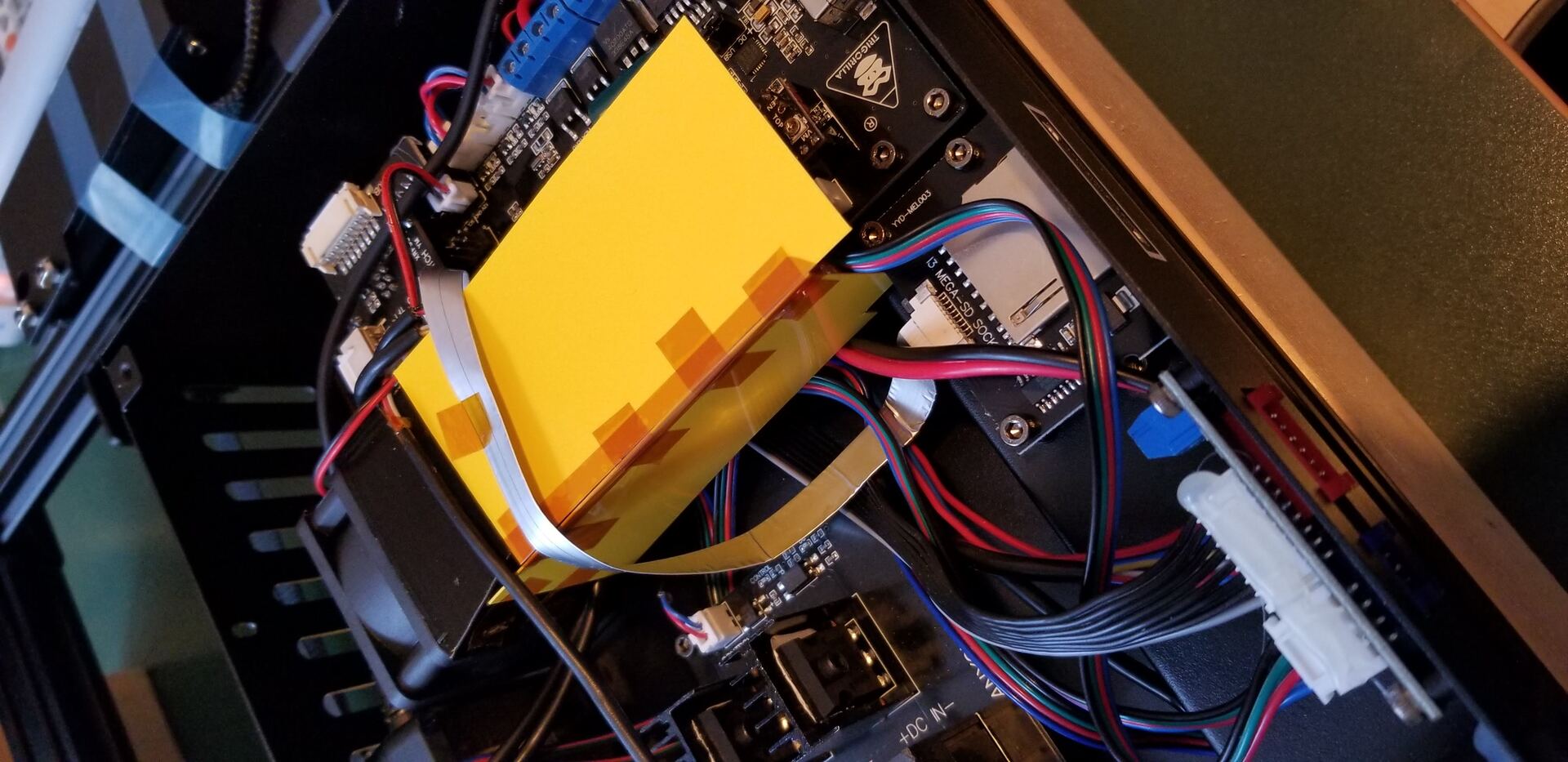
ぱかっと開けたところ

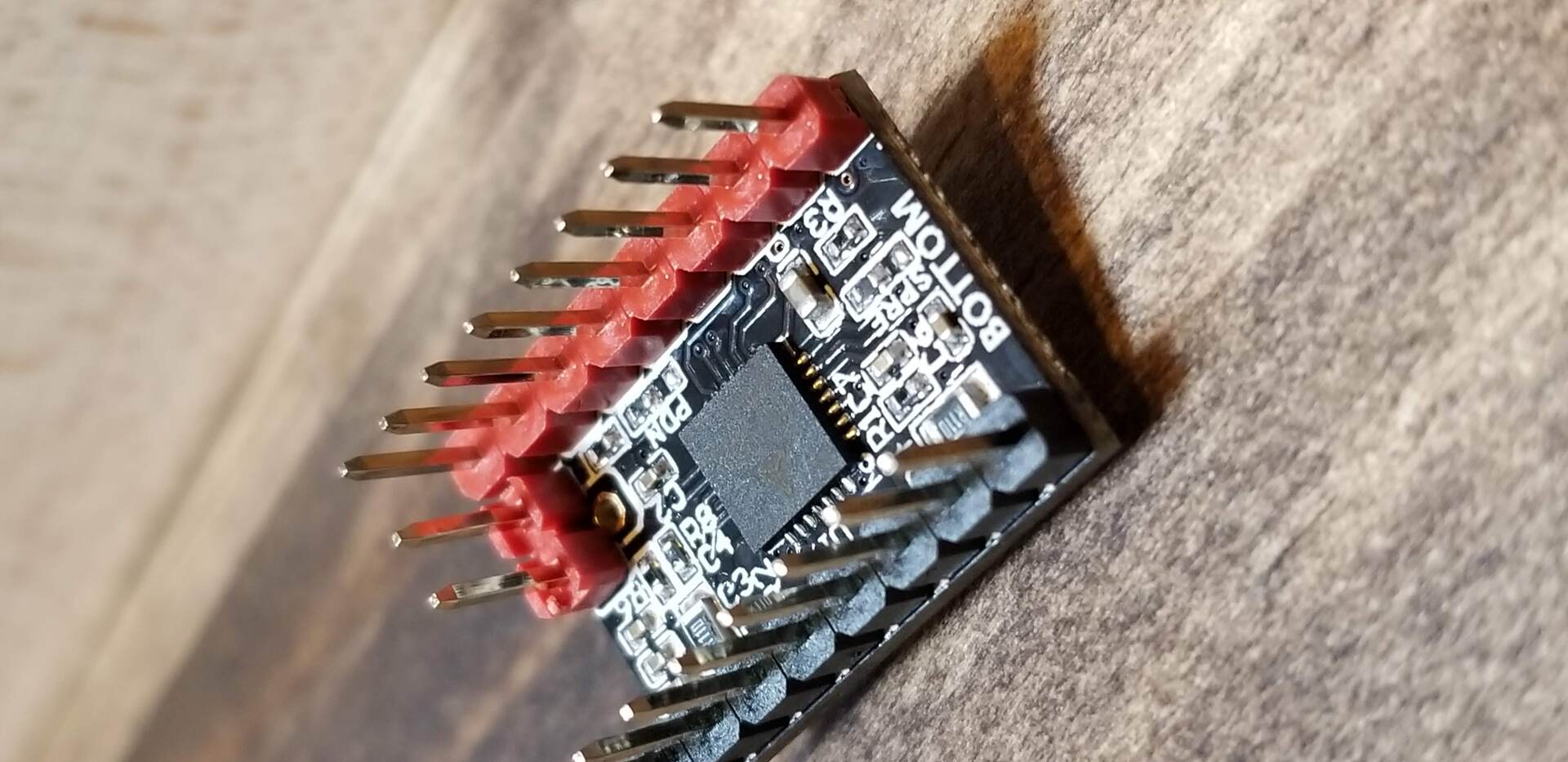
TMC2209の裏側。StealthChop設定になっています。

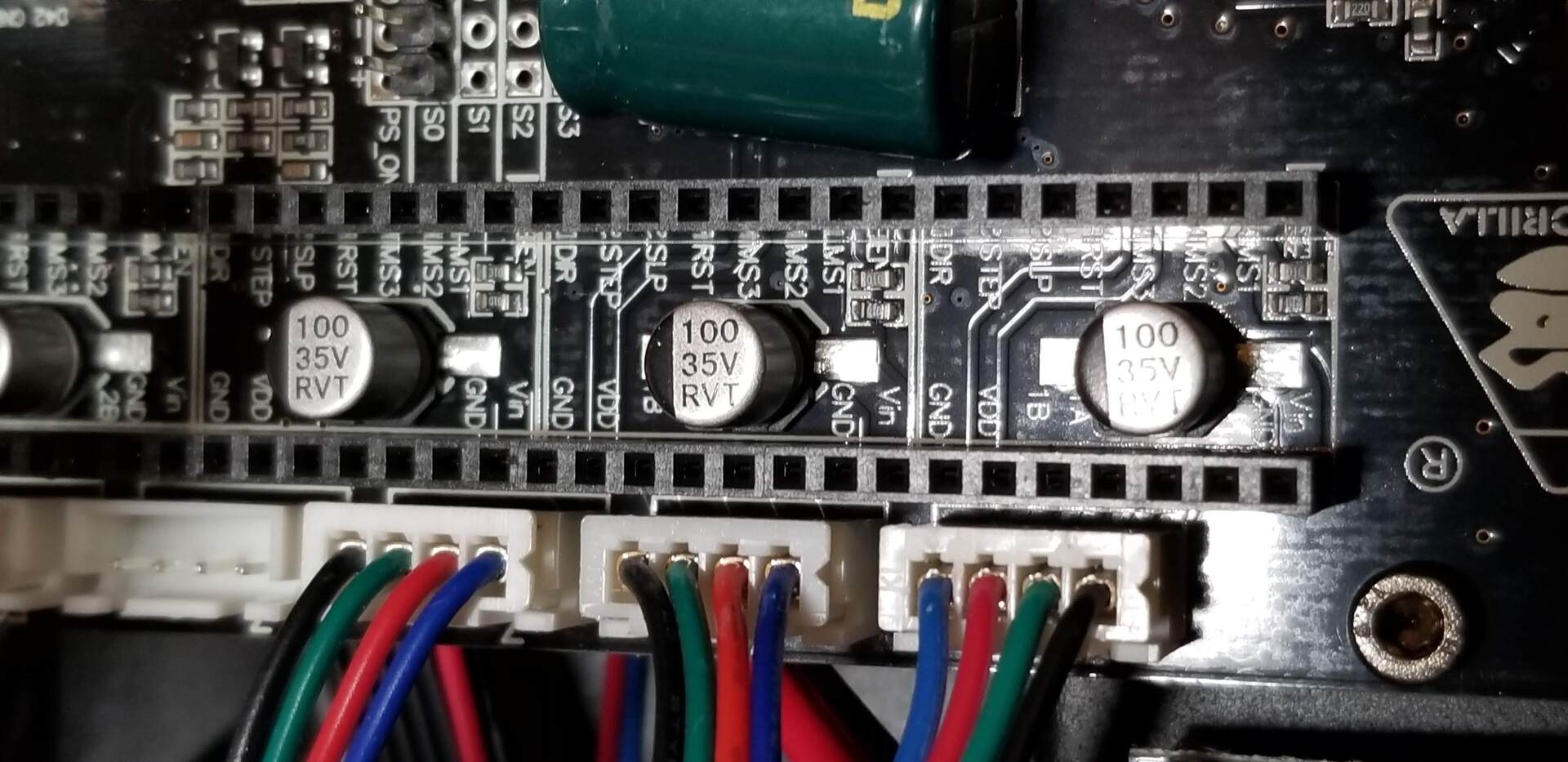
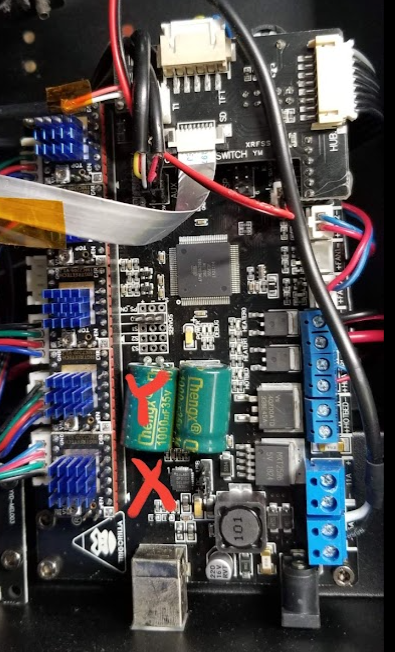
元のモータードライバ外したところ

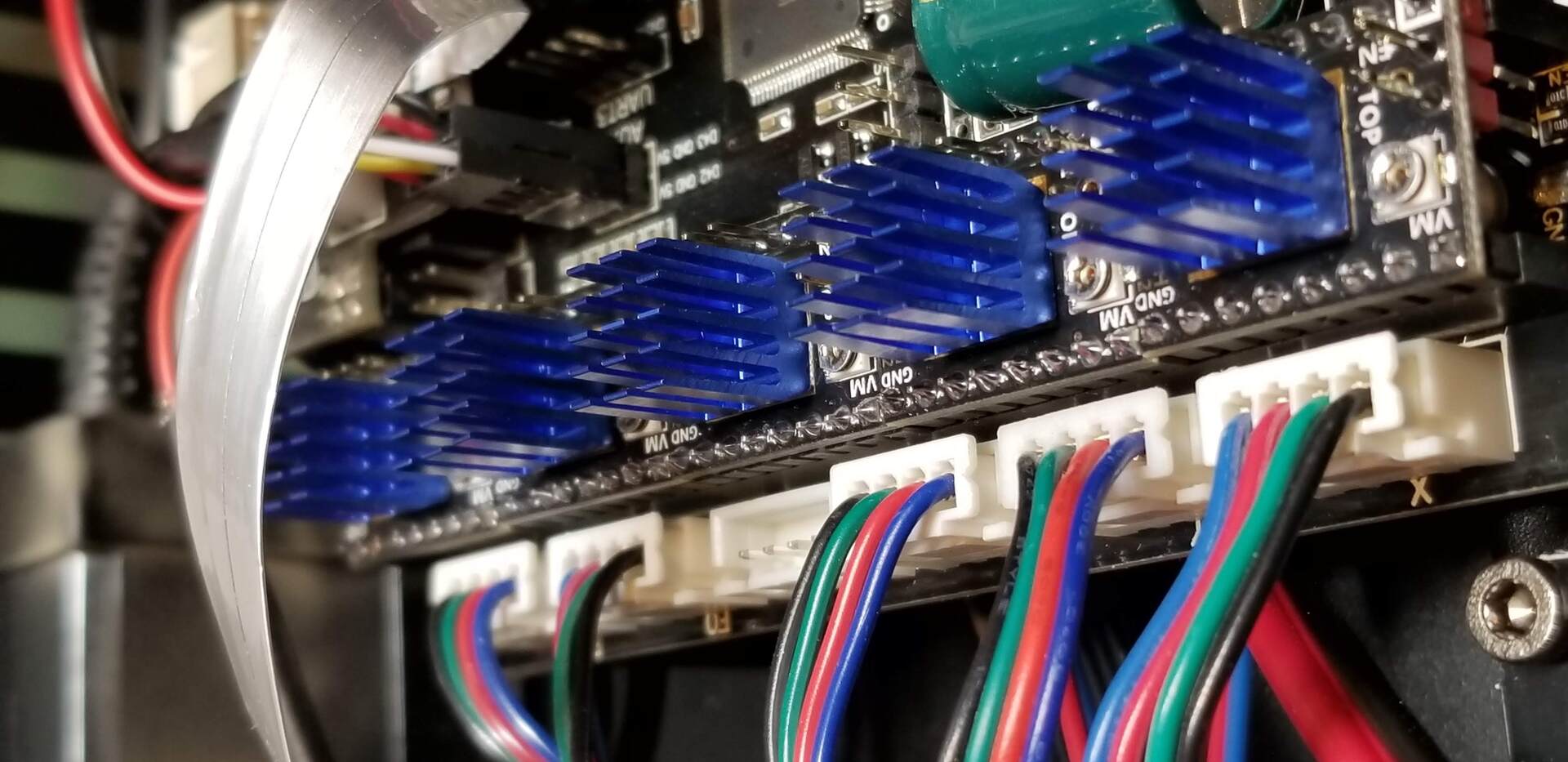
新しいモータードライバ付けたところ
ドライバのVREFは工場出荷の1.2Vにしました。そもそもモーターに流す電流わかってないのでなにが正しいのかわからん。
2021-05-15
電圧再確認 1.2V(0.9A)
2021-07-24
Yのみ1.69V(1.2A)に変更
モーター触った感じ40℃〜50℃くらい。以前はひえひえな感じだった。X軸と比べるとY軸の方が熱持ってる。

VREF計算
https://learn.watterott.com/silentstepstick/faq/
https://3dprintguides.com/2020/05/how-to-calculate-vref/
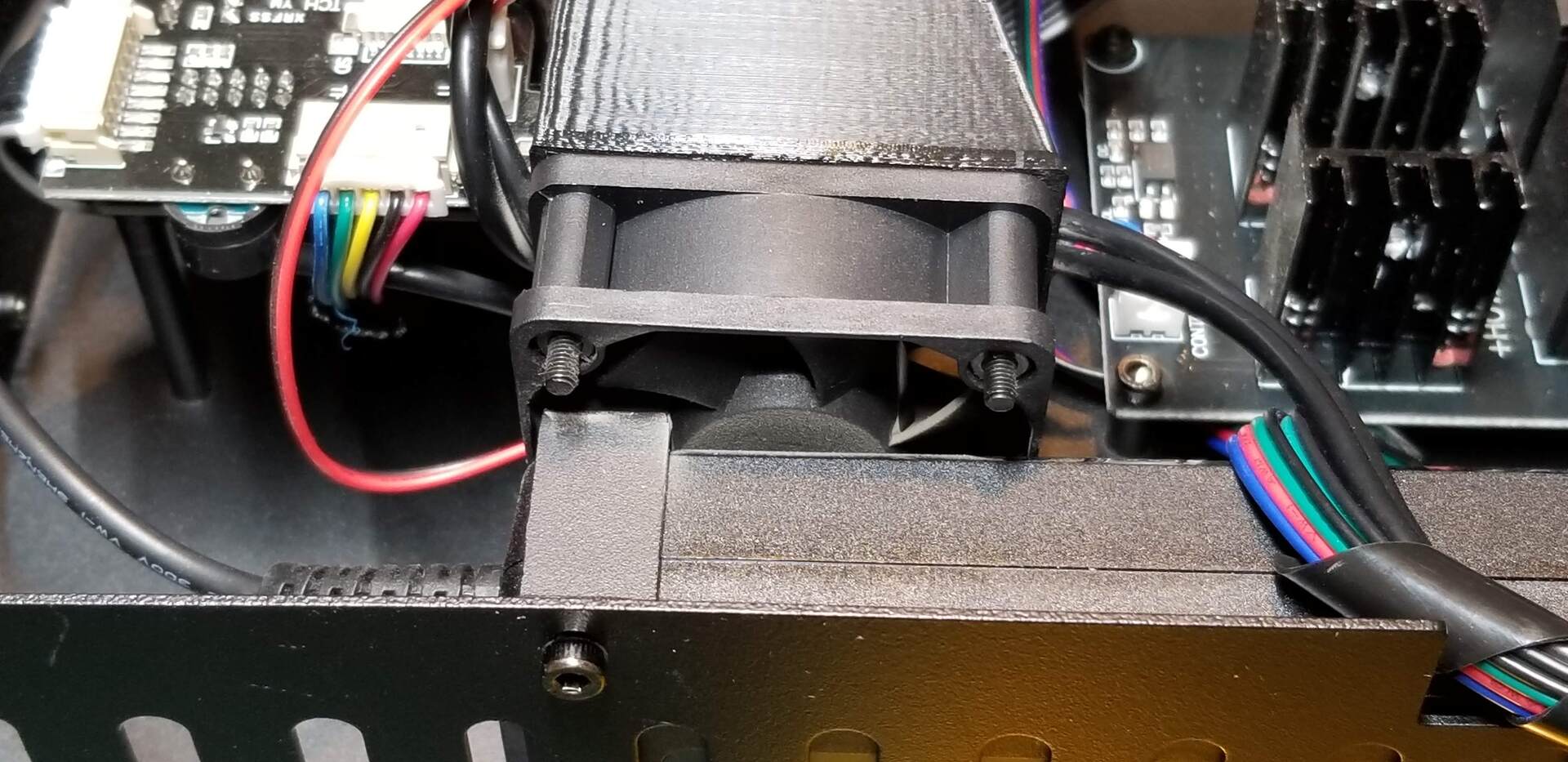
モータードライバ冷却ファンの吸気側が半分塞がってる...

ACアダプタをずらして吸気確保

導風板でもうちょっと風あたるようにしてみた。(効果は未検証、とりあえず角付けようぜレベル)
2021-07-24 外した

ファーム書き換え(Marlin)
ファームウェアを書き換えます。
メリット
・TMC2208使うと駆動方向が逆になってしまうのを、ファームウェアの設定で回避できる
・いろいろ便利らしい(雑
ファームコーディング
Marlin 1.1.9 for AnyCubic Chiron (Version 1.4.2) by AlexLehmann September 17, 2019
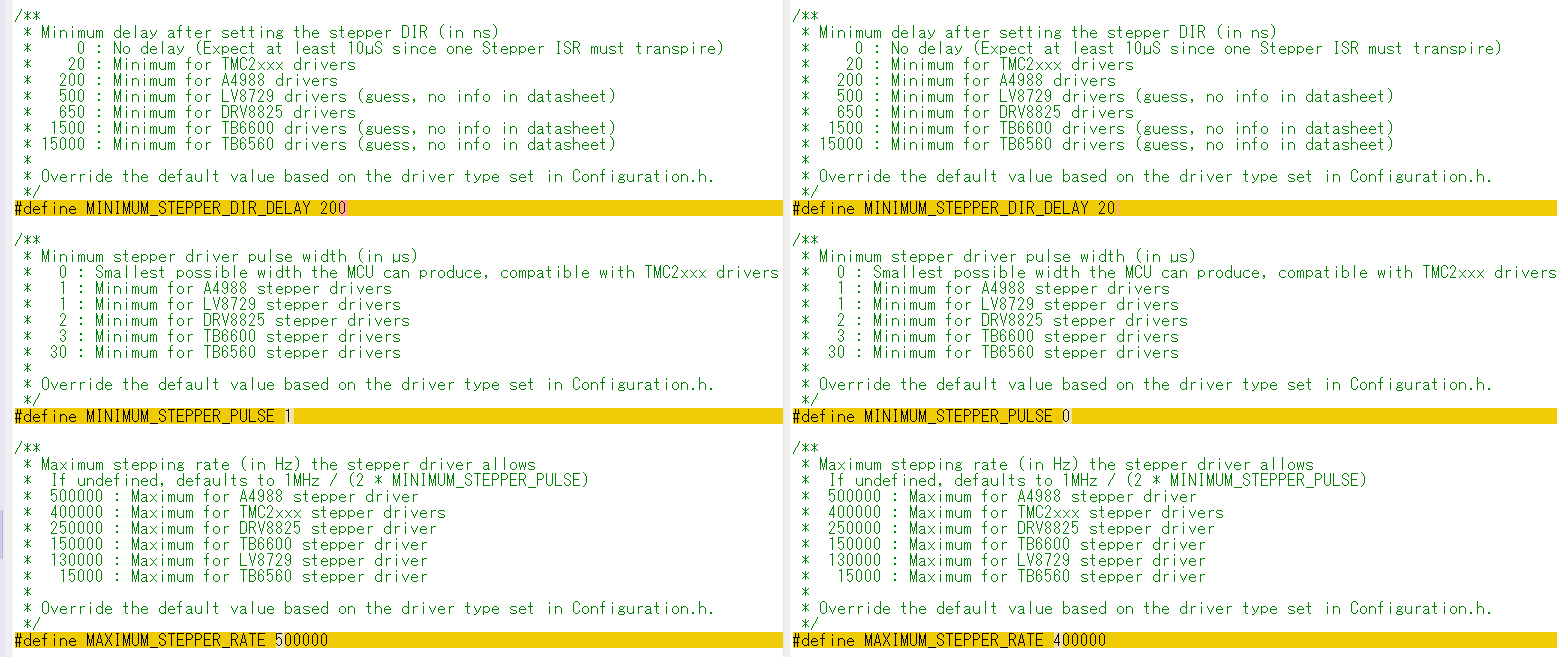
基本的にはTMC2208_STANDALONEになっているっぽいのだが、Configuration_adv.hのぱらーめたがTMC2208になっていなかったので、それは修正した。
Configuration.h

Configuration_adv.h
Arduino1.4.2でビルド
スケッチ→コンパイルしたバイナリを出力
3Dプリンタユーザーの為のファームウェアコンパイル講座
Curaで書き込み
Settingss→Printer→Manage→Update Firmware
「ANYCUBIC_CHIRON_V1.4.2.ino.mega.hex」を書き込む
EEPROMの初期化
REPETIER-HOST以外でgcodeコマンドを送信する方法 -pronterface
>>> M502
SENDING:M502
echo:Hardcoded Default Settings Loaded
>>> M500
SENDING:M500
echo:Settings Stored (731 bytes; crc 1206)
Acceleration & Jerk
さらに調整。Y方向にずれたのでY1500をY1000に変えました
M201 X2000 Y1000 Z60 E10000 ; max acceleration
M204 P1200.00 R3000.00 T1500.00 ; default acceleration
M205 S0.00 T0.00 Q20000 X9.00 Y9.00 Z0.40 E5.00 ; min segment time and jerk
M500
静音
さて、元の音量を忘れたので交換後のみの感想
100mm/s
Y軸は60mm/sより静か。無音ではなく高音を発する感じ。
その他は静か
60mm/s
Y軸がうるさい。ちょうど振動する感じ。
その他は静か
50mm/s
Y軸がうるさい。その他は静か
50mm/s
Y軸がうるさい。その他は静か
30mm/s
500mm/s2
トラベルも同様に遅くする。
Y軸もだいぶ静かになる。
XYZCube出した時、全体的にしわしわが減って良い感じ。
天面はいまひとつだけど、綺麗さにこだわらなければ十分綺麗。
end.
2025-12-04 11:53:02 32400